MXULF decoder update device
MXULF in decoder update mode
MXULF - The device
The ZIMO MXULF(MX Update Laden Fahren) is more than just a simple decoder update device. Like a small digital system, it can fulfil the following tasks:
- Loading new software versions (software update) from the USB stick into ZIMO decoders of all types (sound, non-sound, function and accessory decoders);
the vehicle with the decoder is on the "update track" or the decoder is connected to a test board.
- Synchronisation update for ZIMO accessory decoders of the MX820, MX821 generation installed in the system
- Loading sound projects from the USB stick into the ZIMO sound decoder, vehicle on the "update track" or decoder on a test board.
- Fast sound loading (approx. 2 - 3 min instead of 20 - 30 min) via SUSI interface of the decoder
- Parallel sound loading of several decoders via SUSI interfaces
- Drive mode & function switching for one address at a time via the MXULF operating elements (scroll wheel, 4 buttons, LEDs)
for testing the vehicle being worked on
- Programming and reading out the CVs of the connected decoder or vehicle
- Writing and checking the load code (CV #260, ...) for coded sound projects
All the tasks mentioned can also be controlled from the computer; in this case, no USB stick is used, but all data (software update files, sound projects) are transferred via the USB interface (client). Programmes such as ZSP (ZIMO), ZCS (Manhart), PfuSch (Sperrer), etc. are used on the computer.
The version of the MXULF without display, which was also previously offered, is largely identical in terms of hardware except for the missing screen and can still be operated today with the latest update - especially when controlled via the computer. The later developed, current model with display was therefore called MXULFA for a long time.
Today, the name of the device is generally MXULF again, as it has always been on the casing, in the software and in use by most users.
The MXULF can be used as a low-cost workshop system, and in many respects it can even be used with third-party decoders (except for software updates and sound loading, of course).
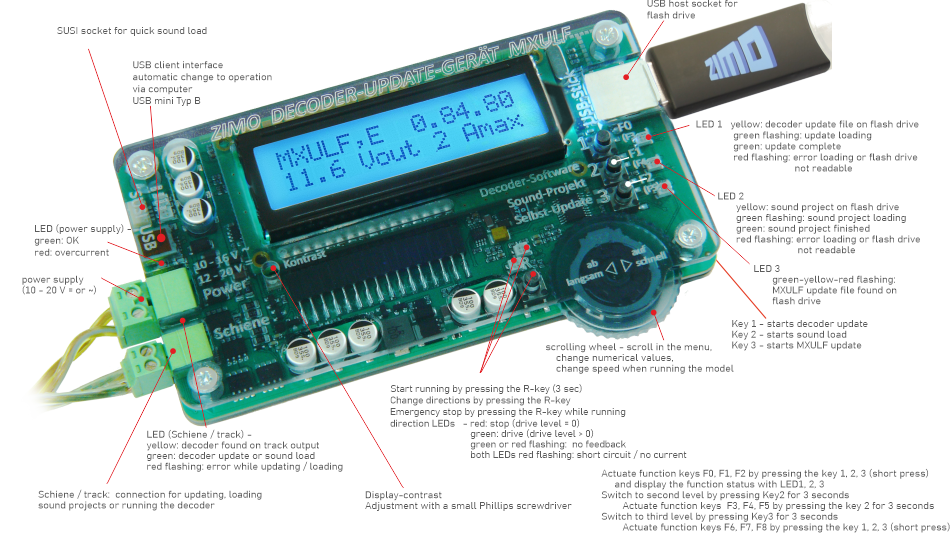
Operating and display elements of the MXULF: 4 buttons, 1 scroll wheel and 8 bi-colour LEDs
External connections: Screw terminals for power supply, track (update track), "SUSI" plug, USB (client, to computer), USB (host)
The MXULF and the vehicle connected to it are powered by any voltage source (direct current 12 - 20 V, alternating current 10 - 16 V). Therefore, no power supply unit is included in the standard scope of delivery, but is available as an accessory if required.
MXULF in decoder update and sound loading mode:
English description following soon!
Software update and sound loading with MXULF
(for MX decoders and MS and MN decoders from SW version 4.08, for full description see MXULF operating instructions)
IMPORTANT: Update MXULF to the latest version beforehand:
- Download the new MXULF software from ..UpdateMXULF as .zip files, unzip the .zip file, save the two actual update files MXULF.ulf and MXULF.bin (names may be slightly different) in the root directory of a USB stick (ZIMO stick or other stick - most of them work ...).
- Preparation of the MXULF:
Disconnect all connections, reconnect the power supply (to the supplied power supply unit or track output of a command station) ➜ LED "Power" "green.
- Insert the USB stick prepared above ➜ LED 3 flashes red-green-yellow (if correct files, i.e. .ulf and .bin, were found on the USB stick).
- Start self-update with button 3 (long, approx. 3 sec).
- Wait for message "SELF-UPDATE OK" - "CRC OK" may appear instead !
- Remove the USB stick, disconnect from "Power".
- Reconnect "Power" ➜ MXULF ready for operation.
Possible update and loading procedures
There are different types of update or sound loading for MX, MS and MN decoders:
- A USB stick or a computer can be used as a data source for the MXULF.
- Loading from the MXULF can then be done into the decoder via track or SUSI pins
The "track" method also applies to decoders that are plugged into a test board (MSTAP, MXTAP),
which is connected to the MXULF via the "Rail" connection.
ATTENTION: Updating and sound loading from the computer via track is (as of 10/2023) ONLY possible with MX decoders!
Software update for decoder using USB stick via the track (decoder installed in locomotive or test board)
- Download new decoder SW collective file -.zsu file (if f"r MS decoder from ..MS-MN decoder SW update) and
to the root directory of a USB stick; preferably (simpler) only this one .zsu file on the stick *)
- Connect "Power" (power supply unit or ...) to the MXULF ➜ LED "Power" green.
- Connect track (or connect TAP to "Rail"), rerail vehicle (only vehicle on track) ➜ LED "track" yellow.
- Insert the prepared USB stick ➜ LED "1" yellow (if decoder SW collective file found), name of the decoder SW collective file on the display.
- Start decoder update with button 1 ➜ Progress indicator on the display.
- Waiting for message "100 %"
- Disconnect the vehicle (or disconnect the decoder from the TAP) and, if further loading or update procedures are to be initiated:
- Acknowledge with button 1, then
- if sound project on the same USB stick, i.e. ➜ LED "2" yellow, start sound loading with button 2 (as below), or
- Connect new vehicle (or connect decoder to TAP) for update with identical SW version.
Sound loading via USB stick over the track (decoder on test board or installed in locomotive)
- Download the desired sound project -.zpp file from the ZIMO sound database and save it in the root directory of a USB stick *)
- Connect "Power" (power supply unit or ...) to the MXULF ➜ LED "Power" green.
- Connect the track, rerail the vehicle or plug the decoder into the MSTAP or connect the decoder cable ➜ LED "track" yellow.
- Insert the prepared USB stick ➜ LED "2" yellow (if sound project/zpp, found), name of the sound project on the display.
- Start sound loading with button 2 ➜ Progress indicator on the display.
- Wait for message "SOUND 100 %"
- Derail the vehicle or disconnect the decoder from the TAP and, if further loading or update procedures are to be initiated:
- Acknowledge with button R , then ready for operation again
*) If there are several .zsu and/or .zpp files on the stick, the first two files are displayed and others can be made visible by scrolling.
The file marked with an arrow is then ready to be loaded into the decoder (press the T or R button).
Sound loading using a USB stick via the SUSI pins (decoder outside the locomotive)
NOTE: SUSI loading is the faster alternative (approx. 10x), but is only possible if the decoder is NOT installed. The plug connectors (PluX, MTC, Next18,...) on an MXTAP or MSTAP test and connection board are used for this. With wired decoders (also with NEM-651 or -652), sound loading via the SUSI pins is also possible, but the SUSI connections (SUSI pads available) must be made accessible by soldered wires (loss of warranty!).
- Save the selected sound project .... on USB sticks *)
- Connect the decoder to a suitable interface (PluX, MTC, Next18,...) - to be on the safe side with the connection board switched off (on/off switch on the board).
- Connect the "Power" to the MXULF ➜ LED "Power" green.
- Connect theconnection board (MXTAP or MSTAP) to the MXULF using the SUSI cable ("SUSI" connectors).
- Press theR button (long, approx. 3 sec) ➜ "open the MXULF menu" on the display.
- Select"SUSI SOUND Load " using the scroll wheel entry.
- Press theR button (briefly) ➜ Start sound loading, progress indicator on the display
- Waiting for message "SUSI 100 %"
- Acknowledge with button R, then ready for operation again
*) If there are several .zsu and/or .zpp files on the stick, the first two files are displayed and others can be made visible by scrolling. The file marked with an arrow is then ready to be loaded into the decoder (press the T or R button).
Using the MXULF from the computer:
The USB interface (client, left) of the MXULF can be used for two different tasks:
Decoder software update and sound loading with the ZSP software.
The procedure for updating or loading sound and how the ZSP works is described in the current ZSP instructions,
Software updates are available under ZSP-ZIMO-Sound-Programmer.
CAUTION: Update and sound loading from the computer via track is NOT possible (as of 10/2023) with MS and MN decoders.
Configuration (CV programming and reading) and driving - from the computer
via the so-called "Bin"re protocol" and with the ZCS software. Information and download link can be found under ZCS - ZIMO-CV-Setting.







