





Das Fahrpult MX33
Das Fahrpult MX33 (in Kabel- oder Funk-Version MX33FU) ist das wichtigste Eingabegeräte der digitalen Mehrzugsteuerung von ZIMO. Es wird zusammen mit dem Basisgerät MX10 als Digitalzentrale eingesetzt.
FAHR-Bildschirme des Fahrpultes MX33:
das aktuelle Fahrzeug wird mittels Schieberegler und F-Tasten gesteuert. Dazu gibt das Display Auskunft über sämtliche Betriebszustände, Funktionen, Weichen- und Signalstellungen, etc...
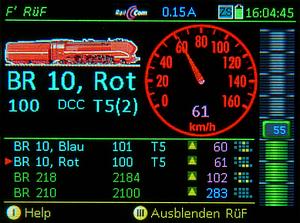
Im großen Fahrpult-Bild oben: typischer Standardbildschirm mit Adresse, Name, Lokbild, Tacho, F-Tasten sowie weiterführenden Anzeigen und Tastensymbolen
Die folgenden Screenshots stammen noch vom Vorgänger-Typ MX32, teilweise gibt es grafische Unterschiede beim MX33.

◀ FAHR-Bildschirm mit sichtbarem RüF (Rückholspei-cher: eine Art Favoritenliste) um andere Fahrzeuge rasch in den Vordergrund zu bringen und zu steuern.

◀ FAHR-Bildschirm ohne Fahrzeugbild, aber mit Namen, Adresse, Tacho und Funktionstasten.

◀ Ähnlicher FAHR-Bildschirm, aber mit großem Lokbild, Digitaltacho und Funktionstasten-Symbolen.

◀ Um ein neues Triebfahrzeug einzugeben, ist nur die Adresse nötig, danach kann man die Lok schon steuern. Weitere Informationen können gleich oder später eingegeben werden.
Bei der Namenseingabe
werden Fahrzeuge mit ähnlichem Namen aus dem Speicher angezeigt.

◀ Eine Mischung aus FAHR-Bildschirm und Zubehör-Adressliste (Weichen oder Signale):
es werden die Zubehördecoder-Adressen und die jeweilige Position der vier angeschlossenen Ausgänge angezeigt.
Hier kontrollieren die Funktionstasten die Weichenstellungen.

◀ Die Panelanzeige: eine elegantere Methode die Zubehörausgänge zu kontrollieren: jedes Signal oder jede Weiche hat ihren Schalter, an dem auch die Stellung angezeigt wird. Das Weichen-/Signalsymbol und die Addresse werden definiert, womit eine klare Erkennbarkeit gegeben ist.

◀ Programmieren im "Operational Mode" (OP PROG) beginnt mit der automatischen Identifizierung des Decoders, d.h. Auslesen einiger wichtiger CVs wie Decoder-Hersteller, -typ, Software-Version, UID und Ladecode. Das Programmieren kann sofort danach oder nach Unterbrechung beginnen.

◀ Das Auslesen und Programmieren mittels RailCom erfolgt (soweit es sich um einen ZIMO Decoder handelt) in einer langen Liste mit Klartext. Dadurch ist der Überblick aller schon "behandelten" CVs gegeben, diese können auch jederzeit nochmals verändert werden.

◀ Eigene Displays für gängige "Mappings" am MX33:
Standard NMRA CV Mapping (mit oder ohne Linksverschiebung),ZIMO Eingangsmapping, ZIMO Mapping der Funktionssounds u. Lautstärken und das Schweizer Mapping (im Bild) um komplexe Lichtfunktionen inkl. Abhängigkeiten einzustellen.

◀ Dieses Bild erscheint, wenn ein anderes Fahrpult das Fahrzeug im Vordergrund steuert. In diesem Fall handelt es sich um ein Fahrpult (oder eine App), das über das XpressNet verbunden ist, wie in der oberen Leiste zu sehen ist.

◀ Kurzschluss auf Schiene 1, der Strom wird sofort abgeschaltet und in allen Fahrpulten wird das Stopp-Fenster mit dem aktuellen Zustand der Schienen ausgänge sowie weitere Möglichkeiten gezeigt. Ein TOUCH auf die jeweilige Fläche am Bildschirm führt zurück zu FAHR oder zum Sammelstopp.

◀ Die Objekt-Datenbank ist eine Liste aller jemals aktiven Fahrzeuge (Adressen) des Systems. Fahrzeuge im RüF: grün, Fahrzeuge in anderen Fahrpulten: blau, inaktive Treibfahrzeuge im MX10: grau. Zu jeder Adresse werden Name, Geschwindigkeit, Fahrtrichtung, die F-Tasten und ev. Mehrfach-Traktionen angezeigt.

◀ Einstellungen für HLU-Fahrstufen (ein ZIMO Special): dieses Bild zeigt die Liste an StEin-Modulen mit Zuständen der Besetztmelder und bis zu 7 HLU-Fahrstufen.
◀ Der RüF wird dazu genutzt, um die Adressen für eine ZIMO (Mehrfach)Traktion zu finden, welche dann durch die TP-Taste und eine Funktionstaste gebildet wird. Dabei könenn fast unbegrenzt viele Fahrzeuge miteingebunden werden. Traktionen anderer Fahrpulte werden ebenfalls angezeigt.

◀ Bei ZIMO Decodern (oder Decodern anderer Fabrikate mit RailCom) wird die echte Geschwindigkeit mittels RailCom-Rückmeldung angezeigt. Der Bildschirm links dient dem automatischen Abgleich des Tachos durch direkte Programmierung der CV #136
Die äußere Gestaltung der ZIMO Fahrpulte MX31, MX32, MX33
Das geschwungene Design, das von Generation zu Generation leicht modifiziert wurde, ist bereits zu einem ZIMO Markenzeichen geworden. Der Grundgedanke hinter dieser Form des Gehäuses, das Gerät als Tisch-Fahrpult oder auch als Walk-around Handregler verwenden zu können, bewährt sich bei den Anwendern seit vielen Jahren.
Kabel- und Funk-Versionen
ZIMO Fahrpulte sind in zwei Versionen lieferbar:
- für die auschließliche Verwendung am CAN-Bus und
- mit integriertem Funk-Modul und fest eingbautem Akku zur wahlweisen, kabellosen Verwendung über Funk oder über den CAN-Bus,
wobei über das Bus-Kabel gleichzeitig der Akku geladen wird.
Die Bedienung ist im Kabel- oder Funk-Betrieb praktisch identisch, nur gewisse Ladesequenzen (Fotos, größere Files,...) können über Funk länger dauern oder unterbunden sein.
Software-Update per USB-Stick
Um das Software-Update möglchst problemlos zu machen, ist eine USB-Buchse (Host) eingebaut (beim MX33 eine USB-C), an welcher ein handelsüblicher Memory-Stick mit der von der ZIMO Website heruntergeladenen, neuen Software-Version angesteckt wird.
Auch zusätzliche Lokbilder-Sammlungen, Bedienungssprachen, Stellwerke, u.a., werden auf diesem Wege über einen USB-Stick in das Gerät geladen.
RailCom
ZIMO Fahrpulte enhalten keine spezielle Hardware für RailCom, da sich die Detektoren in der Zentrale und verteilt in externen Modulen (lokalen Detektoren) befinden. Die RailCom-Information gelangt wie alle anderen Daten über den CAN-Bus in das MX33.
RailCom, also die Fähigkeit der Decoder, Rückmeldungen an das System zu senden, ist ein fundamentaler Bestandteil des ZIMO Systems. Natürlich ist der Betrieb auch zusammen mit Decodern möglich, die RailCom nicht beherrschen; aber besser sind RailCom-fähige Decoder, und zwar solche, die mehr bieten, als nur CV-Programmieren und -Lesen, sowie die eigene Adresse zu melden.
Das Bedienungskonzept
Wie bei modernen Geräten üblich, wird angestrebt, dass die Bedienung ohne ausführliches Studium der Betriebsanleitung intuitiv machbar ist, was natürlich nur bedingt möglich ist. Während der Nutzung findet der Anwender am Bildschirm Hinweise über die aktuellen Optionen, z.B.: die aktuelle Belegung der Softkeys und anderer flexibel zugeordneter Tasten. Bei Bedarf kann außerdem ein Kontext-bezogenes Help-File eingeblendet werden (nicht überall verfügbar).
Die Touch-Fähigkeit des Bildschirms wird vornehmlich zur Veränderung der Darstellungsweise (Wechseln zwischen kleinem und großem Lok- Foto, Umschalten zwischen Tacho-Skalen, Stellen von Weichen in den zukünftigen Stellwerken, u.a.) eingesetzt.
Einen Schwerpunkt bilden auch die Betriebszustände "SERV PROG", das Programmieren und Lesen von CVs im "Service mode" (eigentlich ein Relikt aus der Frühzeit der Digitaltechnik) und OPMODE PROG, das Programmieren im Operational mode (PoM). Auch Decoder anderer Herstellern als ZIMO werden durch das CV-Handling mit Kommandozeilen-Speicherung und CV-Set-Verwaltung unterstützt, ZIMO Decoder jedoch in erweitertem Umfang.
Der Betriebszustand WEI (aus traditionellen Gründen so bezeichnet) fasst Weichen und Signale unabhängig von ihren Anschlussorten an verschiedenen Decodern und Modulen in Schalt-Panels zusammen, wo sie per Zifferntaste oder Touch bedient werden.
Letzte Aktualisierung: 08.11.2023