Im Jahr 1978 wurde die Vorläuferfirma "ZIEGLER & MAIR" gestartet, 1980 das Unternehmen ZIMO ELEKTRONIK gegründet - zunächst als 'e.U.', später als GmbH. Was zu Beginn eine nebenberufliche Tätigkeit des Inhabers Peter W. Ziegler war, wurde ab 1987 zum Hauptberuf. Die Firma befindet sich seit Gründung an der Adresse 1120 Wien, Schönbrunner Straße 188; im ersten Jahr in einer aufgelassenen Kleinwohnung (35 m2) und ohne angestellte Mitarbeiter.
"ZIEGLER & MAIR" bzw. ZIMO beschäftigte sich von Beginn an mit der Entwicklung und Produktion von digitalen Steuerungssystemen für Modelleisenbahnen.
Im Jahr 1979 wurden die ersten Systeme verkauft, bestehend aus dem "Basisgerät BGT1", dem "Fahrpult FP1" und den "Fahrzeugempfängern". Die Bezeichnung "Empfänger" wurde später gegen "Decoder" ausgetauscht. ZIMO Digitalzentralen heißen hingegen auch heute noch "Basisgeräte" und die Bediengeräte "Fahrpulte", was auch weiterhin so bleiben wird.
Bereits bei den ZIMO Digitalsystemen der 1980er- und 1990er-Jahre war die "signal-abhängige Zugbeeinflussung" ein wichtiges Alleinstellungsmerkmal. Damals beworben als Kombination der Lokführer- und der Fahrdienstleiter-Funktion, später als HLU-Methode allgemein anerkannt, wurde sie auch von einigen Mitanbietern übernommen.
In den 1980er Jahren ist ZIMO langsam, aber stetig gewachsen; räumlich auf ca. 150 m2 im Jahr 1990, als schließlich ca. 3 Mitarbeiter beschäftigt wurden.
Viele für lange Zeit richtungsweisende Produktlinien wurden in dieser Zeit eingeführt: neben den Komponenten des eigentlichen Digitalsystems "M1000" und "M2000" sowie den Decodern "M4000", "M4001", u.a. auch Stelltische (aus Original ÖBB-Feldern), zusammen mit dem "Betriebssteuergerät M5000" (als es noch keine Computer-Stellwerke gab ...)..
Während einiger Jahre (um 1990) stellte ZIMO auch Programmiergeräte für industrielle Anwendungen "PICPROG", Versuchsschaltungen für Strahlenmessungen, und Steuerplatinen für Klimaanlagen her.
Im Jahr 1990 wurden die erste automatische SMD-Bestückungsmaschine, die 1999 durch ein moderneres System ersetzt wurde, sowie ein Reflow-Lötofen angeschafft.
Bis zum Jahr 1996 basierten ZIMO Produkte ausschließlich auf dem eigenständigen "ZIMO-Datenformat" (wie es nachträglich genannt wurde), dann folgte der Wechsel auf das durch die NMRA (North American Model Railroaders Association, damals auch in Europa als Normungsinstitution anerkannt) standardisierte DCC-Schienensignal, nebenbei auch auf MM (Motorola - das damalige Märklin-Datenformat).
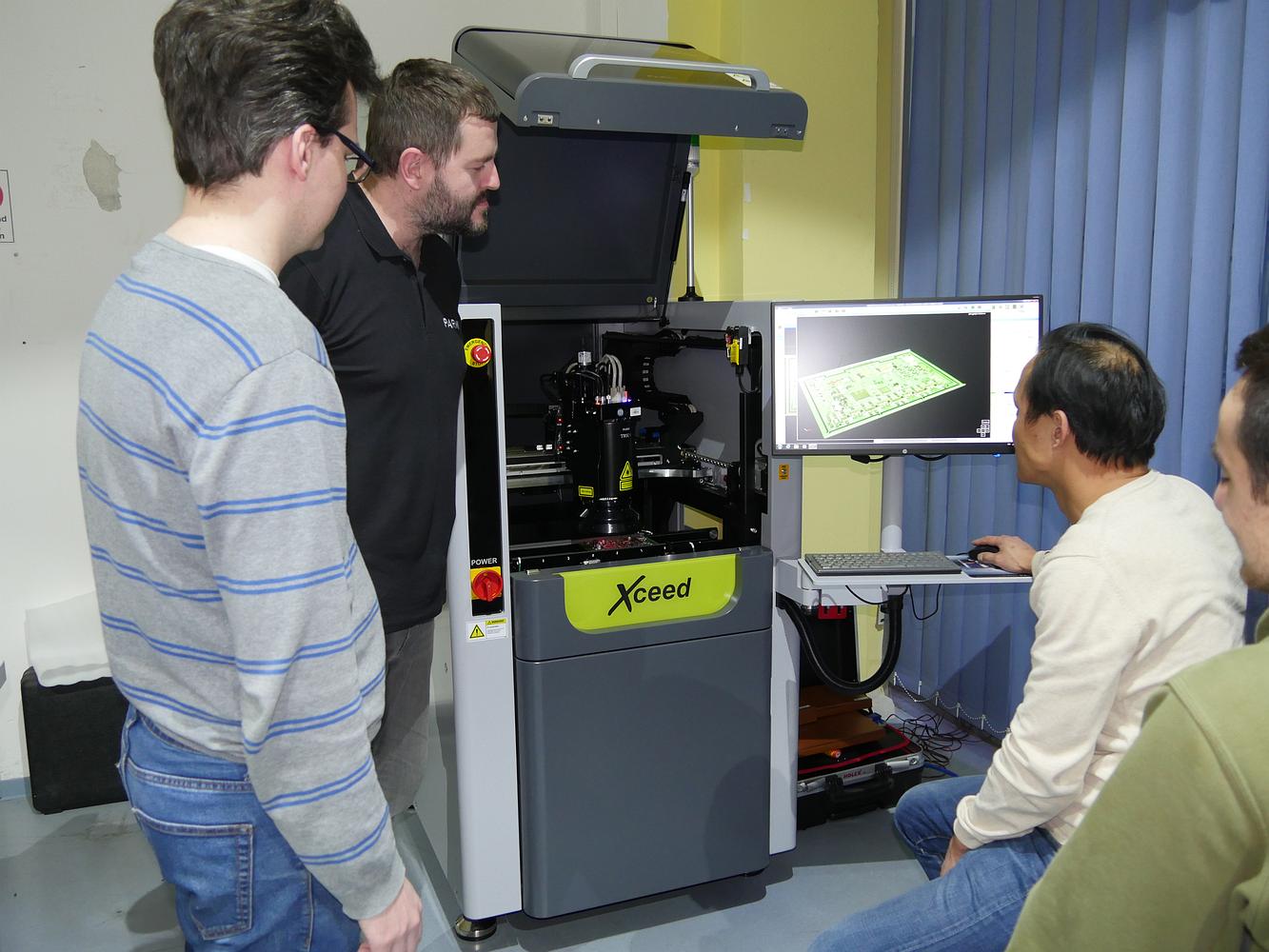
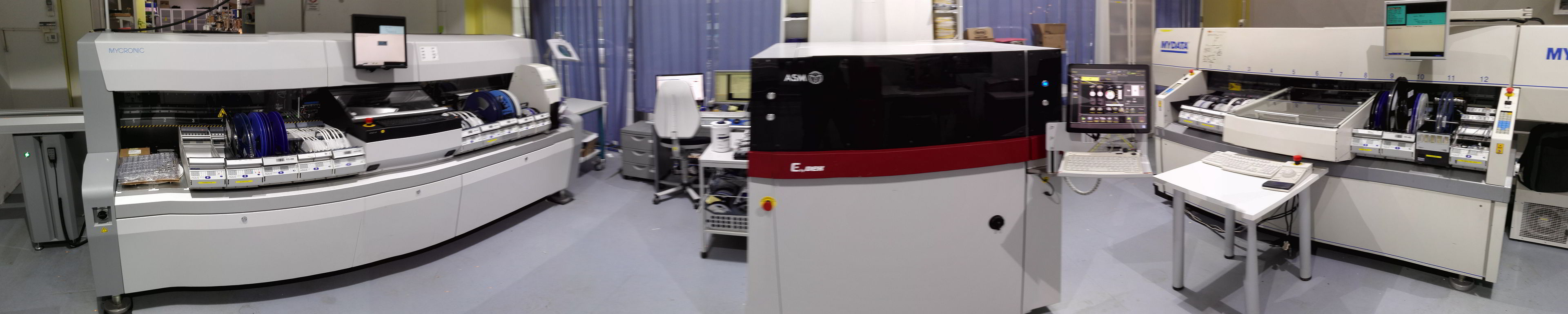
Im Jahr 2009 wurden zusätzliche Räume im Erdgeschoß des 'ZIMO Hauses' (unter Einschluss eines Teiles des Nachbarhauses) übernommen und adaptiert, wo eine komplett neue Produktionsanlage mit Schablonendruck-Automat, Bestückungsmaschi-ne und Reflow-Lötofen aufgebaut wurde sowie Räume für Endfertigung und Prüfung, sowie Materiallagerung eingerichtet wurden. Etwas später wurde ein AOI-System (Automatische optische Inspektion) angeschafft und in Betrieb genommen, um die Ausfallsicherheit der Produkte weiter zu erhöhen. Die Betriebsfläche ist damit auf ca. 500 m2 angestiegen.
In den Jahren ab 2016 trat wieder die Systemtechnik, mit den hochleistungsfähigen Basisgeräten "MX10", Fahrpulten "MX32" und schließlich den Stationäreeinrichtungs-Modulen "StEin" mehr in den Vordergrund.
Im Jahr 2019 standen die Einführung der ersten Typen von "MS-Decodern" im Fokus, einer neuen Klasse von Sound-Decodern (später auch von Nicht-Sound-Decodern), die technologisch neue Maßstäbe setzte. Neben dem DCC-Datenformat wurden diese Decoder auch mfx-fähig gemacht (mfx - das Märklin-Datenformat).
Im Jahr 2020 wurden die Produktionsmaschinen großteils ausgetauscht (neue Schablonendruck- und Bestückungsautomaten, Dampfphasen-Lötgerät anstelle von Reflow-Ofen, neues AOI-Gerät zur 3D-optischen Inspektion), Die Produktionskapazität wurde damit schrittweise um einen Faktor von ca. 2,5 erhöht.
Die Jahre 2021 und 2022 waren vor allem wichtigen Zukunftsenwicklungen gewidmet: dem Ausbau der MS-Decoder-Klasse (insbesondere für Großbahnen), auch in software-technischer Hinsicht; dem Fahrpult MX33 (dem MX32 nachfolgend), ZIMO Apps für Smartphone und Tablet und ZIMO Lichtplatinen und Raucherzeugern. Corona-Pandemie und allgemeine Materialverknappung haben allerdings Kapazitäten abgezogen, um trotz des Fehlens bestimmter Bauteile lieferfähig zu bleiben.
1979
wurde das erste ZIMO Digitalsystem (BGT-1, FP-2, FZE-2), damals noch als 'Mehrzugsteuerung' bezeichnet, ausgeliefert. Die ersten ZIMO Decoder, damals 'Fahrzeug-Empfänger', maßen 45 x 30 x 20 mm. Zu dieser Zeit war das digitale Angebot sehr klein: nur ein englisches System für 16 Züge und 6 Fahrstufen kam fast zeitgleich mit ZIMO auf den Markt. Im Vergleich dazu wirkte das ZIMO System mit 99 Zügen und 16 Fahrstufen fast übertrieben leistungsfähig.
1980
folgte die erste Anwendung der später als "signalabhängige Zugbeeinflussung" bezeichneten Integration von Mehrzugsteuerung und Zugsicherungstechnik, eine bis heute herausragende Spezialität aller ZIMO Digitalsysteme. Es wurde auch bereits ein Decoder-Zusatzmodul für Lastausgleichsregelung entwickelt, wegen seinen Abmessungen damals nur für Großbahnen einsetzbar
1981
erschien im Rahmen der zweiten Systemgeneration (M100, M200, M400) das "Automatisierungsgerät" M500, die erste Version der Betriebssteuerung, welche Blockbetrieb, Fahrstraßen und Bahnhofssteuerung über Drucktastenstellwerke wie beim Vorbild ermöglicht.
1984
hat ZIMO mit dem M210 das erste Mikroprozessor-gesteuerte Fahrpult auf den Markt gebracht, wodurch zahlreiche zusätzliche Leistungsmerkmale wie Rückholspeicher oder Doppel- bis Fünffach-Traktion realisiert werden konnten. Auch bestand von nun an die Möglichkeit des Updates durch EPROM-Tausch.
1987
begann die Herstellung von kundenspezifischen Gleisbildstellwerken aus Original ÖBB-Tischfeldern, die zusammen mit dem Betriebssteuergerät M5000 eine vollständige Ausstattung für die Zugsicherungstechnik bildeten. Das größte Stellwerk umfasste 9000 Felder mit ca. 300 Tasten und 1500 LEDs.
1989
brachte die dritte Systemgeneration (M1000, M2000, M4000), welche neben vielen anderen Komforteigenschaften auch die ZIMO Zugnummernerkennung einführte, eine Funktion, welche für die nächsten 12 Jahre von keinem anderen Digitalsystem geboten werden konnte.
1990
konnten Decoder mit Hochfrequenz-Endstufe (20 kHz) hergestellt werden (MX41), womit weltweit erstmals geräuscharmer Lauf (später auch oft als 'silent running' bezeichnet) mit Lastausgleichsregelung kombiniert wurde.
1992
erfolgte die Ablöse der Betriebssteuergeräte und Drucktastenstellwerke durch die Computer-Software 'STP' (E. Sperrer Software Entwicklung). Der Computer ermöglichte noch mehr Funktionalität in der Zugsicherung als bisher. "Warum mit Spielzeug abgeben, wenn Sie das echte Vorbild haben können" wurde später eine STP-Werbeaussage, die recht treffend den prinzipiellen Unterschied der Methode "ZIMO und STP" im Vergleich zu anderen System- und Software-Produkten zeigt.
1994
kam die vierte Systemgeneration (MX1, MX2, MX40): kompaktes Basisgerät , Walk-around-taugliche Fahrpulte, Infrarot-Fahrpulte, Miniaturisierung der Fahrzeug-Empfänger, Weichen-Empfänger zum Einbau in Antriebsgehäuse, u.a.
1996
war das für den weiteren Firmenbestand entscheidende Jahr der Umstellung auf das standardisierte DCC-Datenformat.
Für einige Jahre wurden Multiprotokoll-Geräte hergestellt, welche sowohl das "alte" ZIMO Datenformat als auch DCC und MOTOROLA ansteuern konnten. MOTOROLA wurde von nun an auch in allen weiteren Systemgenerationen neben DCC unterstützt.
1998
ist die Produktpalette wieder vollständig, jetzt für das standardisierte Datenformat DCC. Insbesondere stehen von nun an die "signalabhängige Zugbeeinflussung" und die Zugnummernerkennung auch für DCC zur Verfügung.
2000
werden mit der sechsten Systemgeneration (Basisgeräte MX1, MX1HS 'model 2000', Fahrzeug-Empfänger MX61 'model 2000', Miniatur-Decoder MX62, u.a.) neue Maßstäbe in Bezug auf Leistungsfähigkeit, Fahreigenschaften und Funktionsvielfalt gesetzt.
2002
kommt mit dem "Economy Basisgerät" MX1EC ein Produkt auf den Markt, mit dem der Einstieg in die ZIMO Steuerungstechnik zu einem bisher nicht denkbaren, günstigen Preis möglich wird - dies ohne Einschränkung von Leistungs- und Anwendungsmöglichkeiten.
2004
wird die genormte 'bi-directional communication' (RailCom) in relevanten Produkten (Basisgeräte, Decoder) vorbereitet (die Inbetriebnahme kann erst nach Verabschiedung des NMRA Standards erfolgen), womit eine Palette erweiterter Anwendungsmöglichkeiten offen steht. Seit Herbst 2004 sind alle ZIMO Decoder update-fähig, d.h. es kann vom Anwender selbst - ohne Öffnen der Lok - mit Hilfe des Decoder-Update-Gerätes eine neue SW-Version geladen werden.
2005
erscheinen die neuen Fahrpulte MX31 in modernem Design und mit neuester Technik, sowie die dazugehörigen Funk-Fahrpulte MX31FU.
2006
kommen mehrere neue Produkte auf den Markt, insbesondere die ersten Sound-Decoder von ZIMO: MX690 und etwas später MX640, sowie das "Zentral-Fahrpult" MX31ZL (Fahrpult mit eingebautem Mini-Basisgerät), ein preisgünstiger Einstieg in die ZIMO Technik.
2007
werden diverse neue Methoden geschaffen, u.a. das "Software-Update für Decoder aus dem USB-Stick", welches besonders komfortabel und problemlos ist, da es ohne Computer auskommt.
2008
beginnt die Entwicklung einer völlig neuen (der siebenten) Systemgeneration, später als MX10 und MX32 bezeichnet . Dies erweist sich als schwieriger als erwartet, da die aktuelle Technologie (u.a. Microcontroller mit Taktfrequenzen im 100 MHz-Bereich und Farb-Bildschirme) neuartige Anforderungen an die Entwicklungsmannschaft stellte.
2010
kommt das neue Fahrpult MX32 auf den Markt, womit eine neue Epoche für ZIMO und die Modellbahnsteuerung beginnt: ein Modellbahn-Bediengerät mit modernstem OLED Touch-Screen, 32-bit-Microcontroller, auf dem u.a. Tachometer und andere Anzeigeinstrumente, aussagekräftige Icons, Fahrzeug-Fotos, bis hin zu Ausschnitten von Gleisbildstellwerken wiedergegeben werden können. Beginnend mit dieser Entwicklung wird nun auch die RailCom-Technologie intensiv genutzt.
2012
ist die Palette der ZIMO Decoder auf ca. 80 Typen, davon 25 Sound-Decoder, basierend auf 18 verschiedenen Platinen angewachsen. Vom Subminiatur-Decoder MX621 (12 x 8 mm) bis zum Großbahn-Sound-Decoder MX695 (6 A Motorstrom, 10 Watt Audio) hat ZIMO praktisch für jeden Einsatzfall ein passendes Produkt.
Nochmals verschoben werden musste allerdings der Erscheinungstermin der neuen Digitalzentrale, des Basisgerätes MX10.
2013
Das Decoder-Update-und-Sound-Lade-Gerät MXULF kommt auf den Markt, wird laufend Software-mäßig ausgebaut, und entwickelt sich zum Werkstätten-Digitalsystem. Gegenüber den vergleichbaren Produkten des Mitbewerbs gibt es eine Reihe von Vorzügen, wie den wahlweisen Betrieb mit USB-Stick oder direkter Computer-Verbindung, das Schnell-Laden von SoundProjekten über die SUSI-Schnittstellen, u.a.
2014
Weitere wichtige Decoder-Typen werden eingeführt, insbesondere Miniatur-Sound-Decoder (MX648) und amerikanische Großbahn-Sound-Decoder (MX697). Die neuen Basisgeräte (Digitalzentralen) des Typs MX10 kommen erstmalig in die Serienproduktion und zur Auslieferung. Die Geräte stehen in Bezug auf Leistungsfähigkeit (d.h. Strom auf die Schiene), Datenkapazität, Kommunikation über Kabel und Funk mit eigenen und Fremdgeräten weit über den Produkten der Konkurrenz.
2015
Neu zur Auslieferung gelangen u.a. der wohl best-ausgestattete Großbahn-Sound-Decoder am Markt (MX699) mit besonders großem internen Energiespeicher, sowie der bisher kleinste Sound-Decoder von ZIMO (der MX649) und ein 8-fach Servo-Decoder mit vielen Zusatzfähigkeiten (MX821).
2016
Der Flachdecoder MX600 ist der preisgünstigste ZIMO Decoder seit Langem, ohne Abstriche vom üblichen ZIMO Standard; einseitig bestückt, dadurch in der Fläche relativ groß, aber flach (2 mm). Weitere Schritte in diesem Jahr sind die Anbindung der Roco Z21 Apps an das ZIMO System (MX10), diverse neue SW-Erweiterungen in den Sound-Decodern im MXULF (jetzt auch mit RailCom), u.a.
2017
Die Palette Decoder und Sound-Decoder wird vervollständigt, daneben findet bereits die Enwicklung der zukünftigen "MS-Decoder" statt, die zunächst wegen ihrer mfx-Fähigkeit auf den Markt kommen sollten (viele Funktionalitäten in DCC waren noch nicht fertig).
Das Stationär-Einrichtungs-Modul "StEin" ist eine weitere wichtige Entwicklungsaktivität in diesem Jahr.
2018
Der Subminiatur-Decoder MX616 (8 x 8 x 2 mm), einer der kleinsten Decoder überhaupt (gemessen am Leistungsspektrum wahrscheinlich DER kleinste) wird jetzt produziert und geliefert.
Das Stationär-Einrichtungs-Modul "StEin" wird erstmals in der Praxis eingesetzt, und zwar vor allem auf sehr großen Anlagen (wo jeweils bis zu 60 "StEine" gebraucht werden), und gleichzeitig SW-mäßig weiterentwickelt, tw. zusammen mit dem Fahrpult MX32, das auch als Bedienungsoberfläche für StEin dient.
2019
Die MS-Sound-Decoder (16-bit Sound, Multiprotokoll DCC & mfx) sind die wichtigste Neuheit; die diversen Typen (nach Baugrößen und Schnittstellen) werden sukzessive auf den Markt gebracht. Daneben kommt die alternative Digitalzentrale MX10EC, die kleinere Ausführung des MX10, auf den Markt.
2020
MS-Großbahn-Sound-Decoder (mit zwei Sound-Ausgangskanälen "Stereo", Gyro-Sensor für Steigung/Gefälle und Kurvenfahrt, u.a.,zusätzlich zu den allgemeinen MS-Eigenschaften) für Spur 0 (MX950) und Spuren 1, G (MS990) erscheinen. Wichtige Hardware- und Software-Ergänzungen des Stationär-Einrichtungs-Moduls "StEin" sind in Entwicklung.
ZIMO Video-Workshops werden gestartet (auf Grund der Corona-Pandemie).
2021
Die MS-Miniatur-Decoder und StayAlive-Lösungen, insbesondere der StayAlive-Controller STACO1 werden eingeführt, ebenso neue Test- und Anschluss-Platinen MSTAPK und -G (für "kleine" Decoder bzw. für MS-Großbahn-Decoder). Die Palette an 16-bit-Sound-Projekten wird stark ausgebaut, jetzt mit Hilfe zweier hauptberuflich bei ZIMO tätigen Sound-Designer und den bewährten externen Sound-Providern.
Das zukünftige Fahrpult MX33 (dem MX32 nachfolgend) befindet sich in Entwicklung.
2022
Eine Reihe neuer Produkte, Produktklassen bzw. Software-Entwicklungen werden eingeführt bzw. stehen kurz vor der Einführung: Großbahn-Raucherzeuger (Single- und Dual-), Lichtplatinen (von Spur N bis Großbahn), MN-Decoder (Nicht-Sound-Varianten der MS-Sound-Decoder), das neue Fahrpult MX33, die ZIMO App als Ergänzung der ZIMO Fahrpulte, "Automatische Anmeldung" nach RCN-218 (kompatibel mit Fremdsystemen, leicht modifiziert für ZIMO-interne Benutzung).
2023
Die ersten Typen von MN-Nicht-Sound-Decodern kommen in den Handel. Der StayAlive-Controller STACO3 wird eingeführt.
Sound-Equalizing für alle ZIMO MS-Sound-Decoder wird eingeführt und bietet bis zu 6 Filterstufen auf das Audiosignal.
Die ZIMO Sound Database wird ständig erweitert und enthält bereits über 300 16-bit-Sound-Projekte.
Das Fahrpult MX33 wird ausgeliefert.